
-
难度:

 使用次数:102
入库时间:2017-07-22
使用次数:102
入库时间:2017-07-22图甲是清代的救火工具“水龙”,使用时,启动横木带动活塞向下压,水箱中的水从输水管中
 喷出,水柱可高达10米.用汽水瓶和吸管模拟“水龙”的工作原理
喷出,水柱可高达10米.用汽水瓶和吸管模拟“水龙”的工作原理 ,往瓶中吹气,瓶中的水就从吸管中喷出,如图乙.
,往瓶中吹气,瓶中的水就从吸管中喷出,如图乙.
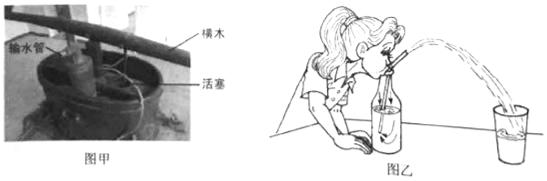
(1)水能灭火的原理是 ;
(2)往瓶中吹气,水能从吸管喷出的原因是 .
-
难度:
使用次数:268
入库时间:2017-07-22
在探究凸透镜成像实验中,小柯不断改变蜡烛到透镜的距离,移动光屏寻找蜡烛的像,并将实验结果记录在下表中:
序号
蜡烛到透镜的距离(cm)
像的特点
1
20.0
倒立缩小的实像
2
16.0
倒立等大的实像
3
12.0
倒立放大的实像
4
6.0
?
(1)第4次实验中,小柯移动光屏只观察到模糊的圆形光
 斑.若要观察到此时所成的像,正确的操作是 ;
斑.若要观察到此时所成的像,正确的操作是 ;(2)小柯在第1次实验的基础上,换用另一个凸透镜后,发现光屏上的像不清晰,把光屏慢慢地向凸透镜方向移动,光屏上又出现了清晰的像.若第1次实验模拟的是正常眼球的成像情况,则换用透镜后的实验是在模拟 的成像情况.

-
难度:
使用次数:130
入库时间:2017-07-22
小柯利用如图甲所示的电路探究电流与电阻的关系,已知电源电压为6V且保持不变,实验所用电阻R的阻值分别为5Ω、10Ω、20Ω,滑动变阻器的规格为“30Ω 2A”.
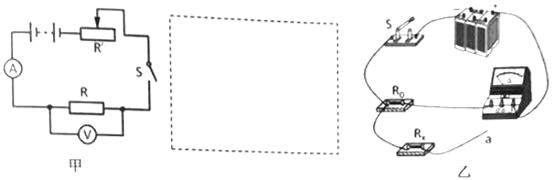
(1)请设计实验数据记录表,画在虚线框内.
(2)小柯将5欧的电阻接入电路,闭合
 开关,调节滑动变阻器使电压表示数为2伏,读出相应的电流值记录在表格中;然后更换电阻重复上述实验.当接入20欧的电阻时,发现无论怎样调节滑动变阻器,电压表示数都无法达到2伏,其原因是 .
开关,调节滑动变阻器使电压表示数为2伏,读出相应的电流值记录在表格中;然后更换电阻重复上述实验.当接入20欧的电阻时,发现无论怎样调节滑动变阻器,电压表示数都无法达到2伏,其原因是 .(3)小柯用图乙所示的电路测未知电阻RX的阻值,图中R0
 为定值电阻,他先将导线a端接到电流表“﹣”接线柱上,电流表示数为I1,然后将导线a端接到电流表“3”接线柱上,电流表示数为I2,则RX的阻值为 (用I1、I2、R0表示)
为定值电阻,他先将导线a端接到电流表“﹣”接线柱上,电流表示数为I1,然后将导线a端接到电流表“3”接线柱上,电流表示数为I2,则RX的阻值为 (用I1、I2、R0表示) -
难度:
使用次数:251
入库时间:2017-07-22
在学习影响滑动摩擦力大小的因素后,小柯还是认为:重力越大,滑动摩擦力越大.于是张老师用如图装置与他一起实验.
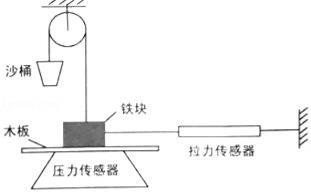
步骤一:将铁块挡在木板上,往砂桶中加入一定量细沙,使压力传感器的示数为5.00牛,水平向左拉动木板,读出拉力传感器的示数并记录.
步骤二:换用质量不同、粗糙程度和
 底面积都相同的铁块,重复步骤一,记录结果如下表:
底面积都相同的铁块,重复步骤一,记录结果如下表:实验次数
质量不同的铁块
压力传感器示数(牛)
拉力传感器示数(牛)
1
小
5.00
2.10
2
中
5.00
2.11
3
大
5.00
2.11
请回答下列问题:
(1)第1次实验中铁块受到的摩擦力为 牛;
(2)实验中能否用钩码代替细沙?并说明理由;
(3)通过实验得出的结论是 ;
(4)小柯认为:该实验中压力传感器的上表面要尽量光滑,否则会使拉力传感器的读数偏大,你认为他的说法是否合理,为什么? .
-
难度:
使用次数:86
入库时间:2017-07-22
我市某些餐厅用只能机器人送餐,送餐机器人的部分参数如表所示.
功能
迎宾、送餐等
质量
50kg
移动速度
0.2~0.6m/s
电池容量
12Ah
功率
最大功率100W
工作电压
24V
最大送餐质量
15kg

(1)机器人身上有感应红外线新奇的接收器,以便接受信息,则该接收器相当于反射弧中的 .
(2)机器人底盘的轮子与水平地面接触的总面积为0.01米2,求机器人水平运送3千克物体(含餐盘)时,对地面产生的压强;
(3)如果该机器人以最大功率在水平地面上以0.4米/秒的速度匀速前进10秒,求机器人行进过程中受到地面对它的阻力.