-
难度:

 使用次数:114
入库时间:2016-07-26
使用次数:114
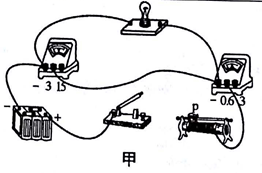
入库时间:2016-07-26在“测量小灯泡的电功率”实验中,电源电压为 6V(不可调节) ,小灯泡的额定电压为2.5V,电阻约
为 8 Ω且工作时电阻变化不计,有滑动变阻器R1“10Ω1A”和 R2“20Ω1.5A”及导线若干:
⑴ 小红选择合适的滑动变阻器连接了如图甲的电路,请用笔画线代替导线将电路连接完;
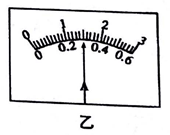
⑵ 小红连好电路后,闭合开关,调节滑动变阻器的滑片,当小灯泡正常发光时,电流表示数如图乙
所示,则灯泡的额定功率为________W;
⑶ 要利用现有器材测试小灯泡两端电压为 1.5V时的电功率,在原电路的基础上,小红应该______。
-
难度:
使用次数:171
入库时间:2016-07-26
今年是我国系统推荐智能制造的发展元年,机器人、人工智能、智能制造首次出现在“十三五”
规划中。长沙市某中学的小明从小就热爱科学,尤其是对机器人着迷。听说长沙开了一家机器人餐厅,
他更是兴趣盎然地前去体验一番。走进餐厅,门口的迎宾机器人便发出“欢迎光临”的声音。餐厅内
的科幻感十足:厨房里,刀削面机器人有节奏地挥动刀片,大小均匀的面条“嗖嗖嗖”地飞进上方浮
动着白气的面汤里;柜台上,跳舞机器人在音乐伴奏下跳着《江南 Style》,音乐声传递着无限的欢乐;
餐厅里,五台送餐机器人沿着地面上的黑色磁条轨道在餐桌间有条不紊地穿梭,将菜准确无误地送到
客人的餐桌前,并发出“您好,您点的菜到了,请拿一下,谢谢!”的声音。为防止碰撞客人,每台送
餐机器人都装有遥感装置,一旦发现行进范围内有障碍物就会停止前进。每台送餐机器人高 1.5米,
每次可运送15kg的物体。每台机器人每天工作8小时,只要消耗大概6.4度电。通过交谈小明了解到,
餐饮机器人功能相对简单,技术也并未完全成熟,还需要多方面研发和改进。小明决心努力学习,将
来在机器人领域中做出自己的贡献。
⑴ 机器人发出“欢迎光临”的声音,是由于发声体的_________而产生的。
⑵ 请根据文中所给信息提出一个与物理知识相关的问题并进行回答。(注:不与第一问内容重复)
问:_________________________________________________________________?
答:_________________________________________________________________。
-
难度:
使用次数:170
入库时间:2016-07-26
某海上蹦极挑战者的质量为50kg,下落的高度为45m,所用时间为5s,g取10N/kg,
⑴ 挑战者下落的平均速度; ⑵ 重力对挑战者所做的功; ⑶ 重力做功的功率。
-
难度:
使用次数:294
入库时间:2016-07-26
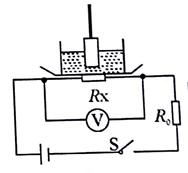
科技小组设计了一个给工件镀膜的电路模型,通过改装电压表来观察和控制工件放入镀膜中的深度。如
图,电源电压恒定,R0为定值电阻,在压敏电阻RX上放有托盘,托盘上放有容器(不计托盘和容器的
质量) ,容器内装有40N 的水。闭合开关,用轻质杠杆连接不吸水的圆柱体工件,将工件两次浸入水
中(均未浸没且不触底,水未溢出),第一次工件下表面距水面 2cm,电压表示数为 6V,杆的作用力为
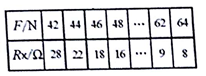
10N;第二次工件下表面距水面6cm,电压表示数为4V,杆的作用力为6N。压敏电阻上表面的受力面积
为20cm2,其电阻值RX随压力F的变化关系如右表。 G 取 10N/kg, ρ水=1.0x103kg/m3,求:
⑴ 工件未浸入水中时,压敏电阻所受的压强。
⑵ 工件下表面距水面 2cm时,其下表面所受水的压强。
⑶ 为使工件浸入镀膜液中的深度越深(未浸没),电压表的示数越大,从而控制镀膜情况,你认为应该
怎样利用现有元件改进电路?
⑷ 在原设计电路中,如果工件两次浸入水中压敏电阻所受压强的变化大于6000Pa,该电路的电源电压。