
-
难度:

 使用次数:156
入库时间:2015-05-22
使用次数:156
入库时间:2015-05-22小红的实验小组用如图甲所示的实验装置探究杠杆的平衡条件。
⑴在调节杠杆的平衡时,如果杠杆右侧高左侧低,应将两端的平衡螺母向____调节,使其在水平位置平衡。使杠杆在水平位置平衡的好处是_______________;
⑵将下列实验表格补充完整:①处应填:_________,②处应填:__________;
实验
次数
动力/N
动力臂
/m
阻力/N
阻力臂
/m
①
②
1
2
3
⑶如图甲所示,杠杆上的每小格长为2cm,在支点左侧的A点挂3个重均为0.5N的钩码,在支点右侧的B点,用弹簧测力计拉杠杆,使其在水平位置平衡。这时弹簧测力计的示数应为_____N。如果保持B点不动,弹簧测力计的方向向右倾斜,使杠杆仍在水平位置平衡,则弹簧测力计的示数将变_____。
-
难度:
使用次数:56
入库时间:2015-05-22
阅读短文,回答问题。(5分)
我国高新6号固定翼反潜巡逻机
中国新型反潜巡逻机“高新6号”可通过雷达、声呐、磁异探测器等系统对海面船舶和水下潜艇进行搜索,其水下探测深度一般为300-450米,最深可达900米。
如图所示机尾“棍子”是磁异探测器,它利用潜艇经过的海域磁场的强度变化情况来发现潜艇的存在。磁异探测器有探头、电子设备、记录装置、补偿装置等部件组成,核心部件探头是绕满导线的金属敏感元件,对磁场的变化反应非常灵敏,产生磁场强弱变化的信号。
机翼后设有浮标声呐投放口,调放声呐有两种工作状态,主动工作状态是指声呐换能器主动向水中发射声波,声波碰
 到潜艇后被反射回来,形成回波,由计算机测算出潜艇的距离与方位,但所发射声波容易被敌方侦查到;被动工作状
到潜艇后被反射回来,形成回波,由计算机测算出潜艇的距离与方位,但所发射声波容易被敌方侦查到;被动工作状 态只是被动地接受潜艇发出的噪音,优点是比较隐秘,不易被敌方发现,缺点是只知道有潜艇存在。
态只是被动地接受潜艇发出的噪音,优点是比较隐秘,不易被敌方发现,缺点是只知道有潜艇存在。请回答下列问题:
(1)磁异探测器中电子设备把磁场强度变化信号转化成 ,进过检波和放大,补偿装置把干扰信号过滤掉,最后由记录装置记录下来。
(2)实际搜艇过程,先用 工作状态探测是否有潜艇的存在,一旦确定有潜艇,就改用 工作状态,确定其方位与距离。(填写“主动”和“被动”)。
(3)潜艇的浮沉靠改变自身的 来达到目的,潜艇为了避免“高新6号”巡逻机发现,潜艇外壳至少要承受海水压强为 Pa。(海水密度为1.03×103Kg/m3)
-
难度:
使用次数:284
入库时间:2015-05-22
某校科技小组的同学们用PTC元件(即半导体陶瓷材料)制作了一个电加热保温杯。常温下的凉开水放在杯内可加热至60℃,并利用这种元件的特性设定保温温度为60℃。已知所用的PTC元件的阻值RT随温度的变化关系如图23甲,使用时PTC元件 如图23乙接入家庭电路中。
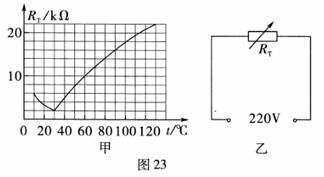
请回答下列问题:
(1)当温度为 时,电路中的电流是22 mA,通电1min,PTC元件消耗的电能
是 J。
(2)PTC元件的最大电功率是 W。
(3)保温杯可以利用PTC元件的特性进行保温的原理是:当温度达到60℃时,PTC元件发热功率等于散热功率(即在相同时间内产生的热量与散失的热量相等),温度保持不变。从图23甲可以看出,①当它的温度高于60℃时, , 温度下降;
②当温度低于60℃时, ,温度上升。因此保温杯中的水可以保持在60℃左右。